支援団体インタビュー
2010年度
東京大学
RoboTech
【インタビューに答えてくれた方々】
紺野 一樹さん(工学部機械情報工学部4年、部長)
赤﨑 拓未さん(理学部情報科学科3年、手動ロボット操縦者)
室岡 雅樹さん(工学部機械情報工学部3年、プログラマー)
東京大学RoboTechは、NHK大学ロボコンとその世界大会のABUロボコンに向けて、ロボット製作に取り組んでいる団体です。2011年6月に開催されたNHK大学ロボコンでは優勝、8月に開催されたABUロボコンではベスト8に入り、ABUロボコン大賞を受賞しています。テレビ番組でその様子を見た方も多いのではないでしょうか?
今回は1年間どのようにロボット製作に取り組んだか等、学生ものづくり支援に応募いただく皆様の参考となりそうな内容をインタビューで伺ってきました。
チーム紹介・マシンの特徴

ミスミ:本日はよろしくお願いいたします。簡単にチームの紹介をお願いできますか?
紺野さん:RoboTechは東大の1~4年の学部生のみで構成されています。先日終わったロボコンに向けて55人で取り組んでいました。僕ら機械系を中心に、理学部科学系、航空等いろんな学科の人が所属しています。ロボコンはサッカーや相撲といろいろありますが、僕達はメンバー全員で毎年6月に開催されるNHK大学ロボコンに出場し、そこで優勝して、その後の世界大会であるABUロボコンに出場して勝つことを目的にしています。
ミスミ:チームの中での役割分担はどうなっていますか?
紺野さん:ロボット別の分け方と、要素ごとの分け方があります。前回のロボコンですと人が操縦する手動ロボット1台と自動ロボット2台の計3台があったので、3班に分かれてロボット製作を進めました。要素ごとには、金属を加工するメカ、回路基板を作る回路担当、最後にプログラムを書いてどうロボットを動かすか決めるプログラマーです。回路担当は3つのロボットに共通だったりもするのですが、ロボットと要素ごとに分かれて製作を進めていました。
ミスミ:その中で赤﨑さんと室岡さんはどのような役割でしたか?
赤﨑さん:僕は手動ロボットの操縦者をやりました。55人の中では特殊で、ロボットを動かし続けてメカやプログラムの不具合を見つけて、よりよいものを作っていくという役割でした。
室岡さん:僕はプログラマーをやっていました。今年は自動ロボットについて、カメラを通してロボットを動かすという初めての試みを行いました。そのプログラミングを担当していました。
ミスミ:今年度初の試みとは?
室岡さん:板が揺れているところにクラトン(注:前回大会で使用された炎の形をしたアイテム。これをきちんと落とせれば勝利。)を落としますが、どのように揺れても目標に向かって落とせるように、そして、速さを重視しなければならないので、カメラを使って検知する方法を採用しました。新しいセンサを採用たのですが、これがあったお陰でいいロボットが作れたかなと思っています。
ミスミ:どういったセンサなんですか?
室岡さん:キネクトと言って、Xbox(R)でも使われています。赤外線を全体的に放射して、対象物までの距離がわかるようになっています。クラトンのどこがどこにあるかがわかるので、そこを抜き出してクラトンの状態を把握しました。別の1チームもキネクトを使っているところはありましたが、うまく動いていないようでした。使いこなすのは難しいということではないかなと思います。
ミスミ:全マシンに共通する特徴はありますか?
紺野さん:僕達は、工業系の大学ではありませんし、大学からロボット製作を始めたメンバーが多いので、凝った加工というものができません。だから、複雑なものを作ることは自分達のチームにそぐわない。僕達が目指しているのはシンプルな機構と手間のかからない加工をやって、練習すれば誰にでも作れるようなものを作ることです。シンプルなものを作れば設計も短時間で済みますし、予備の準備やメンテナンスも楽になります。このように見た感じもスッキリとしています。
この形に行きつくまで、機能を増やしたり性能を上げたりしていく段階では、ゴテゴテしていたりしましたが、最終的に収束させていく時には不要なものを削ぎ落として簡単なものにしていきました。重量も軽くなって、操作もしやすくなります。凄まじい性能はなくても、シンプルで確実性が高く、それが高い性能で動き続け、大会で勝つことをこのチームは目指しています。
赤﨑さん:前回のロボットは、ロバスト性が非常に高かったことも特徴に挙げられます。制御の話にもなってくるのですが、位置の補正に関して、タイヤの回転数で位置を把握するという方法をとるのが速いチームだと一般的です。その他に、フィールドにラインが引いてあるので、それを追いかけて行って目的の場所に到達する方法もあります。その両方をうまく組み合わせて、自分の位置の認識と補正をしました。今年は一つ一つ確実なものを作っていったことが優勝につながっていったかなと思います。
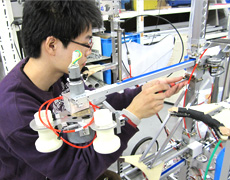
室岡さん:他の大学になかったことと言いますと、この「箱」です。このロボット、どこにも回路が見当たらないと思いませんか?スイッチは例外として、残りのモータ等マイコンのボードは、全部この箱の中に入っています。回路の人が今日いないので適当なことを言っちゃうと怒られるかもしれないんですが、直接基板がむき出しになっていると、近くで電流が流れた場合に誤動作したり、ナットが落ちて来て基板に当たってショートする可能性があります。モータが壊れたら交換するまでロボットを動かせません。これで負けるのはいやなので、確実しようということで箱の中に入れました。全部のマシンで回路等を箱の中に入れました。去年まではやっていなくて、今年から回路担当者が始めたことです。
紺野さん:少なくとも国内で同じことをやっているチームはなかったです。プラスチックのケースというのはありましたが、ノイズの対策にはなりません。回路チームのメンバーが自作で穴を開けたりして作りました。アルミケースに入れることで一見重量が大きくなって、実際大変になったりするんですが、回路をむき出しにして動かなくなるリスクよりも、多少重くなっても毎回回路がきちんと動くことが担保される方を選択しました。
ミスミ:念には念を入れて、準備したことが伝わってきます。
前回大会への取り組み
ミスミ:日本やタイでの世界大会を通して、苦労した点はどこですか?
赤﨑さん:苦労した記憶しかない…(笑) 操縦は、最初にポールを相手チームと取り合う場面があり、そのスピードで試合の結果が左右されるので緊張しました。あと、僕が動かさないとマシンのどこが悪いかなかなか出てこないので、ロボットの質を高めるという点でなかなかしんどかったです。
ミスミ:何回くらい練習しましたか?
赤﨑さん:6月のNHKロボコンまでに8282回です。班の名前がパニパニ班だったので、それにちなんで…。
ミスミ:パニパニ班って何ですか?
赤﨑さん:手動ロボットの班の名前です。試作の段階で、手動ロボットの掴む部分をメカ屋さんが「パニ」って言って作ってきました。そのまま班の名前もパニ班になり、その語呂で練習の目標回数が8282回に(笑)無事、NHKロボコンの前に達成しました。
紺野さん:最終的に世界大会に出る時までに、1万3千回ちょい一連の動作を練習しました。
ミスミ:メカで、なかなか克服できなかったことはありましたか?
紺野さん:重量です。1号機は各マシン20kg近く、合計60kg近くになってしまいました。ルールでは50kgの制限があるので、機能を低下させないように重量を落とす作業に毎年苦労します。
見た目にわかりやすいのは、穴をボコボコ開けていくことなんですけど、実際はそこまで効果はありません。抜本的に、「この機構が複雑すぎるから、もっとシンプルにしなきゃいけないね」と話しながら、何度もバージョンアップをしていかなければならない。そのバージョンアップのためにも、何度も何度も動かして、どこがまずいか洗い出すことが必要で、その繰り返しが大変です。概ね、最終版はバージョン3です。NHKロボコンの後、他の大学の機構を参考にして自動ロボットを新たに設計し直しました。最終的に47kgくらいに収めることができました。
ミスミ:プログラム班はどうでしたか?
室岡さん:僕が担当していたろころですと、シーソーで揺れているものの上にろうそくの形をしたクラトンを落とすんですけど、どこまで行ったら完成かわからなかったです。放送の時は、NHKの番組では100%成功とか言っていたんですが、全然そんなことはなくって…。
赤﨑さん:練習ではちょいちょい落としていたからね。
室岡さん:本番で入ったと言っても6回とか10回です。それまでの1万回という練習の中では千回とか2千回とか失敗しているので、それを目の前で見ていたり、手動ロボットの操縦者が何回と練習しているところ見ていたりすると、自動ロボットはこれで完成だと言えない。最後の炎のところで負けてしまったら、なんて言っていいのやら…。(一同:笑)
ミスミ:終わりが見えないのは、難しいですね。
張田さん:室岡さん:はい。ただ、どんなにやっても100%のものはないという気はしていました。それでも本番の6回という数は少ないわけですから、そこでは入るものを作ろうと思っていました。それは国内大会もそうですし、世界大会も数日前まで新しい改良を加えていました。反対に試合が始まったら、自動ロボットは動くだけなので、どうしようもないという感じで見ていました(笑)
部品調達について

ミスミ:話は変わって、どのようにミスミ部品を選びましたか?
紺野さん:僕はカタログをよく使いますが、eカタログを使う人が多いですね。必要な型番やサイズが明確になっている場合はeカタログ上で、すぐに入力します。設計のイメージがぼんやりしていることもあって、この世の中に何かないのかな?と思う時、僕は紙のカタログをめくってみます。
ミスミ:CADデータのダウンロードも使いましたか?
紺野さん:はい。僕達のCAD上では、ミスミからダウンロードしたCADのパーツが使われています。
今後の目標

ミスミ:今後のRoboTechの展望や意気込みを教えてください。
赤﨑さん:前回届かなかった世界大会での優勝を目指します。去年から長々とテストランを繰り返して、日本大会での優勝や世界大会での試合を通じて、確実性がとても大事だということがわかりました。会場にロボットを運んで、調整して、持って帰るとこまで、そして、どんな準備をするのかを一つ一つを論理立てて、説明できるロボットを作りたい。そういうものづくりって社会に出てからも大事だと思うんです。
ミスミ:本日は、長い時間ありがとうございました。
使用したミスミ部品
ミニチュアワンタッチ継手 MNCシリーズ
空気配管。小さくて軽くて安いので、大量によく買います。
耐水性ポリウレタンチューブ PUTシリーズ
空気配管。ミスミにはいろいろなチューブがあるので、便利です。
シャフトホルダ STHシリーズ
モータからタイヤへの伝達部分。自分達ではキー溝の加工ができないので、便利です。
インタビューを終えて
好成績の裏には、「世界大会での優勝」という強い目標と、メンバーの地道な努力の積み重ねがありました。タイでの世界大会にも日本から水と食料を持ち込んだそうです。最後の最後まで手を抜かない点は、さすが日本代表!インタビュー後、完成済みの模型を使って、次年度の大会のルールを教えていただきました。香港のまんじゅう祭りを模したルールのようです。複雑で難易度の高い内容ですが、世界大会での優勝を目指して、これからもがんばってください!
東京大学RoboTech ホームページ
http://www.mech.t.u-tokyo.ac.jp/robotech/