支援団体インタビュー
2021年度
インターカレッジサークル
Cross Progress
【活動内容】
インターカレッジサークル「Cross Progress」は、ハードウェアからソフトウェアまでゼロから開発し四脚ロボット※1の製作を行う学生団体です。メンバーそれぞれが考える理想的なロボット技術を日々追求しています。
※1 四足動物を模倣して、四本の足でフレキシブルな運動ができるロボット
■Cross Progress公式HP
https://www.cross-progress.com/
【インタビューに答えてくれた方】(2022年3月現在)
大西 祐輝さん(制御・動作計画担当/東京工業大学 工学院 システム制御系 博士後期課程 1年)
星 隼人さん(機械設計担当/金沢工業大学 工学部 ロボティクス学科 4年)
安達 波平さん (チームリーダー、認識ソフトウェア設計担当/
筑波大学 システム情報工学研究科 コンピュータサイエンス専攻 博士前期課程 2年)
『ミスミ学生ものづくり支援』を
利用して
今回は、四脚ロボットの製作を通じて、各要素技術の研究開発をしているインターカレッジサークル「Cross Progress」の大西さん(制御・動作計画担当)、星さん(機械設計担当)、安達さん(チームリーダー/認識ソフトウェア設計担当)にお話を伺いました。
ミスミ学生ものづくり支援では、機体や実験器具に使用するアルミフレームやネジなどの基礎部材のほか、工具などを支援していただきました。日頃からミスミECサイトを利用しており、各種ツールが充実していると感じています。実際に、ベアリングやリニアガイドなど受動部品の選定では、耐負荷や形状、価格ごとの分類が見やすくまとめられていて、選定から購入までをスムーズにかつ正確に行うことができました。加えて、豊富な品種から比較して必要な部品を必要な個数手に入れることができ、とても便利でした。
 ミスミフレームスを用いて製作したセンサユニット
ミスミフレームスを用いて製作したセンサユニット
また、私たちの活動では、実験設備等の設計や部材の調達を機械設計の担当者以外がすることがあります。センサユニットの設計では、カメラやLiDARの画角を考慮して、配置を適切に決め、同じような構成でフレーム長の微調整を繰り返す必要があります。アルミフレーム筐体設計ソフト「MISUMI FRAMES」は操作方法がわかりやすいため、ソフトウェア担当者でも設計をすることができとても役立ちました。
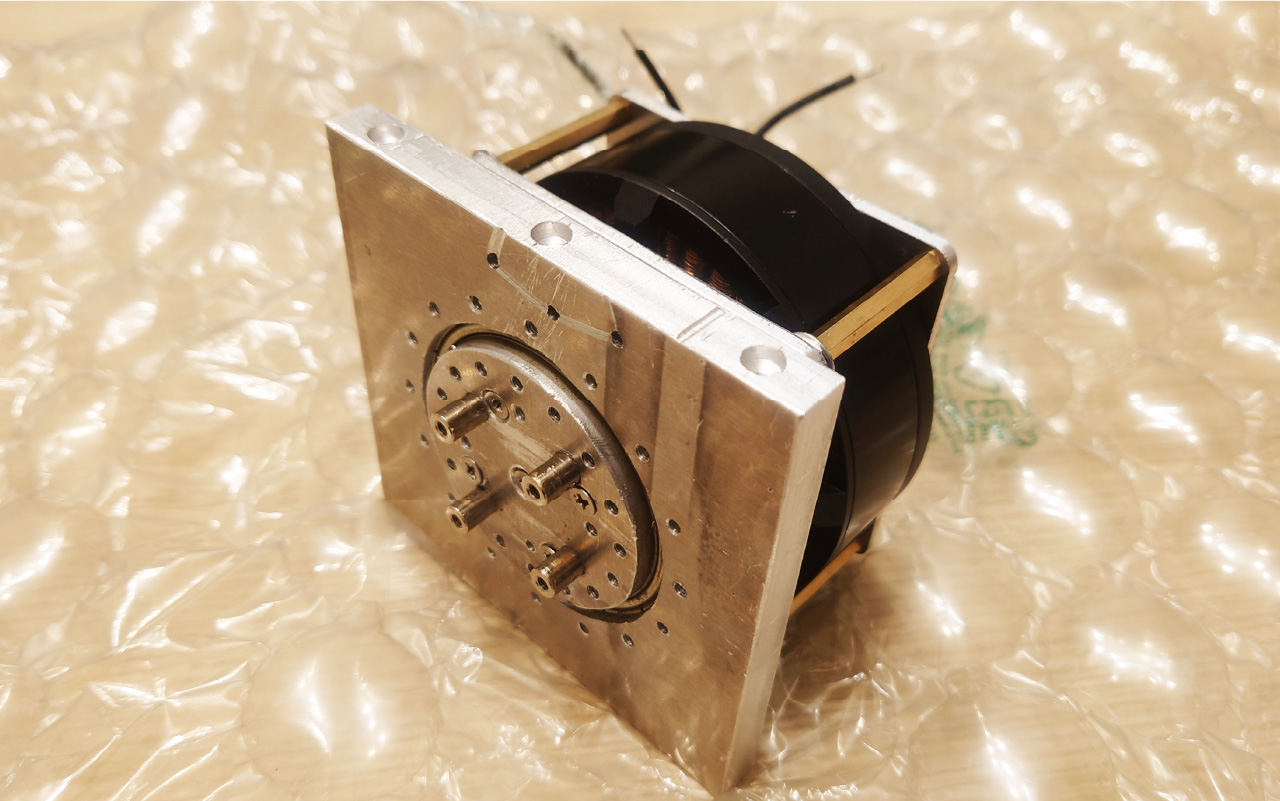 ロボットの脚を構成するアクチュエーターユニット
ロボットの脚を構成するアクチュエーターユニット
それぞれの技術をロボットに統合、
「つくばチャレンジ」での評価
Cross Progressは、国内外の大学・大学院生5名のインターカレッジサークルです。チームリーダーの安達が、ロボット競技会や勉強会のコミュニティで知り合った同年代のメンバーに声をかけたのが始まりです。大学の枠を越え、メンバー全員が最高の技術を目指すという理念を持ち、その実現に向けてCross Progressは結成されました。
メンバー5名はそれぞれ機械、回路、制御、自己位置推定、環境認識を専門とし、四脚ロボットを介して各要素技術の研究開発に注力しています。また、私たちの最終的な目標の達成度を評価するために、各技術を集結させたロボットを製作し、「つくばチャレンジ」に参加しています。「つくばチャレンジ」とは、公道でロボットを完全自律で動作させる公開実験です。自律移動をはじめ、人の探索や信号のある交差点の通過といった実践的なタスクが用意されており、国内で四脚ロボットの検証を行うには最適であると考えています。
メンバーの居住地は関東、東北、北陸、アメリカと分散していますが、定期的にオンラインでミーティングを実施し、進捗や方向性について議論しています。
「つくばチャレンジ」で各要素技術、および全体として統合した際の問題点を洗い出し、その後の改良につなげていきたいと思います。メンバーはそれぞれの各要素技術に基づいて、四脚ロボット研究に対する意気込みと「つくばチャレンジ」への目標を掲げているので簡単にご紹介させてください。
 居住地が異なるためオンラインミーティングで
居住地が異なるためオンラインミーティングで
進捗状況や方向性を議論
■環境認識担当 安達波平さん(筑波大学所属)
近年の関連研究の成果により、四脚ロボットは十分な「環境認識」能力が備わったことで、不整地においてより多くのミッション遂行が可能なレベルに達しています。そのため十分な環境認識能力を備えることこそが、他の形状のロボットでは不可能なミッションも可能とする四脚ロボットの力を引き出す最後の鍵になると考えます。「つくばチャレンジ」では環境認識が十分な速度で走行し、未知環境でもロバスト※に動作するかを確認し、次なる四脚ロボットの進化に貢献できるよう研究に取り組んでいきます。
※環境の変化や極端な状況などに耐性を持ち安定して機能し続けられる性質
■機械担当 星隼人さん (金沢工業大学所属)
ハードウェア設計では、世の中に出ているノウハウが限られていることもあり、ゼロからの開発を行っています。トライアンドエラーを繰り返して確実に動作するものを作り、制御・電装・認識それぞれの要求性能を最大限引き出せる、拡張性の高い設計をしたいと考えています。「つくばチャレンジ」では、連続稼働時における、減速機をはじめとする可動部や、構造材の耐久性、機構の効率などを確認し、今後の改良につなげたいと考えています。
■自己位置推定担当 小平暁雄さん
(カリフォルニア大学バークレー校所属)
地図情報やセンサデータから、 ロボットがどこにいるかを推定する自己位置推定アルゴリズムの多くは、ドローンや自動車といったアプリケーションを想定して開発されており、不整地を走行する四脚ロボット特有の縦揺れの外乱やノイズに対してもロバストである保証はありません。「つくばチャレンジ」では、実際のロボット歩行で外乱を受けても正しく動作する信頼度の高い自己位置推定アルゴリズムの実現を目指しています。
■制御担当 大西祐輝さん (東京工業大学所属)
四脚ロボットは、基本的に歩行の安定性が高い一方で、あえて不安定な状態にしても高い運動性能を発揮することができる興味深いシステムです。「ただ歩く」であれば既存技術の範囲で充分ですが、「巧く歩く」ことは挑戦する余地が多くあります。「つくばチャレンジ」では、コース内に坂道や複数の異なる路面が存在するため、環境認識結果のもと適応的な歩行動作の実現を目指します。
■電装担当 槇原豊さん (東京工業大学所属)
電装では、ロボットの重量や形状の制約を考慮しつつ、回路構成をロボットに最適化することによって、使用するセンサやアクチュエータの能力を損なうことなく発揮する回路の実装を追求していきます。「つくばチャレンジ」では、長時間の運用でもアクチュエータの性能を十分かつ安全に引き出すことができるかを確認します。
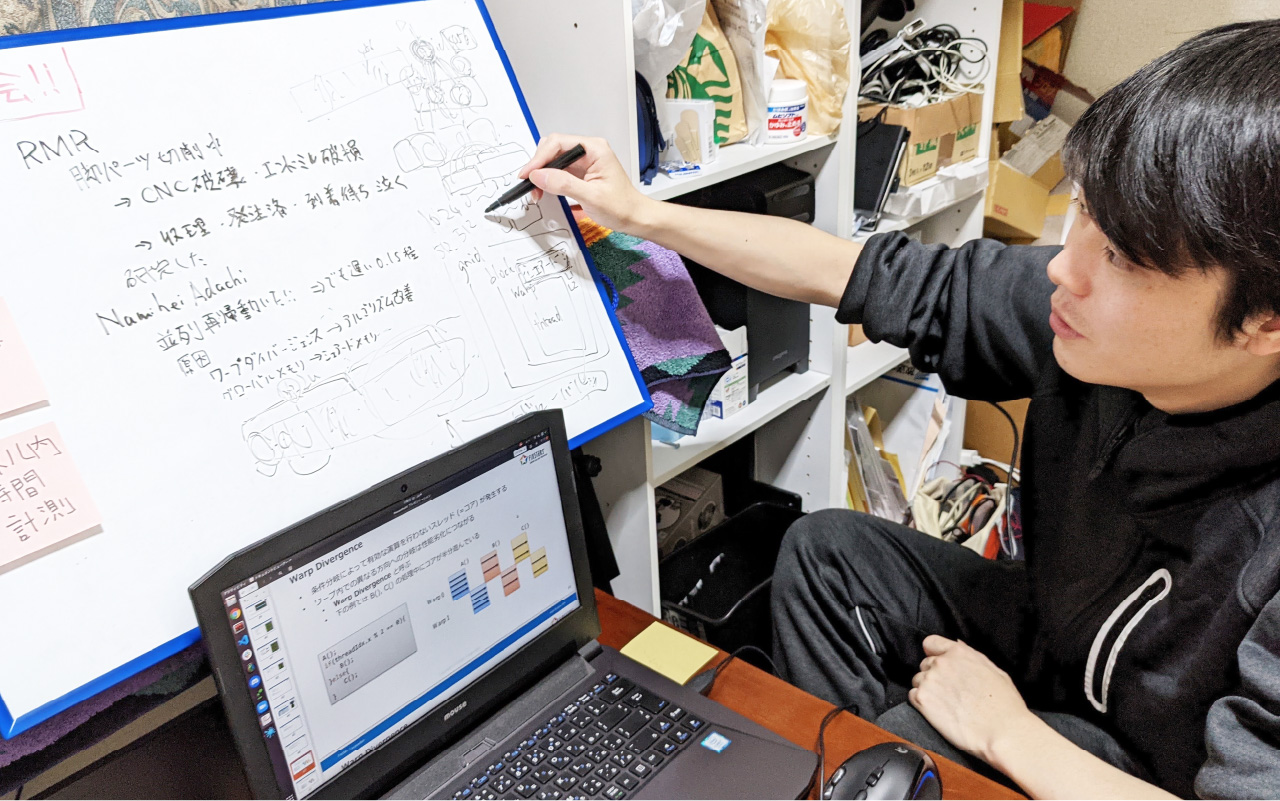
 各専門分野にわかれて研究開発
各専門分野にわかれて研究開発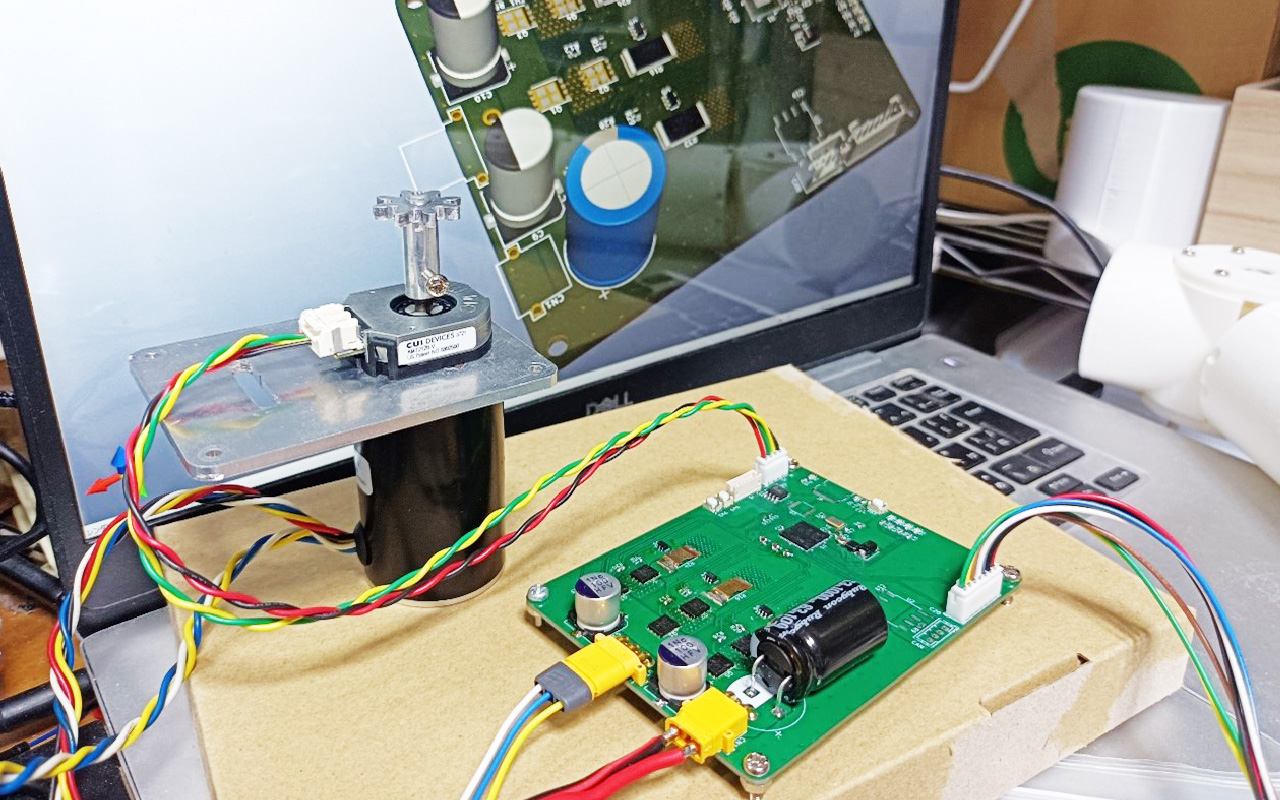 電装の動作確認
電装の動作確認四脚ロボットは、機械設計のセオリーが確立されていないため、動作環境について可能な限りの想定を行い様々な状況に対応ができるよう注力しています。また、制作費も限られているため、一回の試作におけるコストを下げつつ、設計変更に耐えられるような設計を考え工夫しています。今回ご支援いただいたことで、作業環境の拡充や材料の調達ができ、まずは1脚分の試作機が完成しました。これにより、ハードウェアが部分的に完成したため、より具体的な課題と研究開発を進めていくことが出来るようになりました。
また、つくばチャレンジシンポジウムでは各チームの進捗状況を毎年報告し、他の出場チームとの情報交換の機会を増やすよう努めています。
 四脚ロボットの脚パーツ(試作機)が完成
四脚ロボットの脚パーツ(試作機)が完成
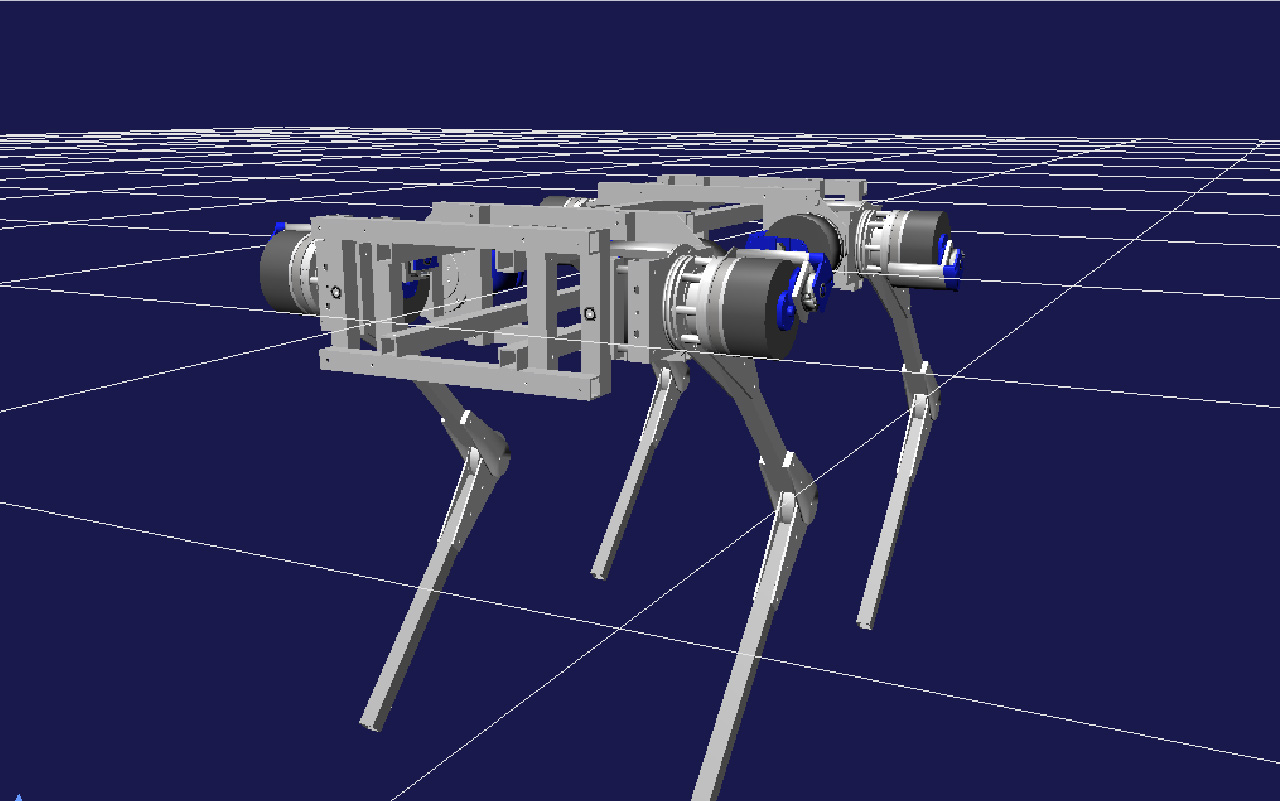 完成イメージ図
完成イメージ図 活動は貸会議室を利用することも
活動は貸会議室を利用することもメンバー個人のこだわりや情熱を尊重し、
国内の四脚ロボット技術へ貢献
四脚ロボットは、近年著しく技術が発達し、多くの可能性が見込まれています。現在は、米国や中国、EUで商用化が進んでいますが、流通している日本製ハードウェアは存在せず、技術情報もあまり多くありません。私たちの研究活動により、国内に四脚ロボットのハードウェア・ソフトウェア両方の知見を積み上げ、関連分野の技術水準を引き上げることができれば、将来的に国内のロボット技術とそれに関連する産業への大きな貢献につながるのではないかと考えています。
またチーム全体の成果だけでなく、メンバー一人一人の個性やこだわり、情熱を尊重して活動しています。メンバー全員が野心的に研究開発に取り組める環境を維持することで、プロジェクトを長期的に持続できるようにしていきたいです。
最後に、「ミスミ学生ものづくり支援」と「ものづくりに取り組む学生のみなさん」へ
メッセージをいただきましたのでご紹介します。
私たちは、四脚ロボット研究のさらなる発展を志す学生が集まった有志団体です。
メンバーの私費で全ての費用を賄っていたため、ロボットのハードウェア開発のための資金が慢性的に不足していました。「ミスミ学生ものづくり支援」のおかげで、私たちのロボット製作は脚機構のプロトタイプ完成の目途を立てることができました。学生のものづくりには様々なリソースが必要になりますが、モチベーションと資金がとりわけ重要だと感じています。このサイトをご覧になっている皆さまはモチベーションが十分ある方々で、「ミスミ学生ものづくり支援」は、その熱意に応えてくれる支援プログラムだと思います。一歩踏み出して応募してみることをおすすめします。皆さまの活動がより良いものになることを願っています。