支援団体インタビュー
2013年度
大分大学
ロボコン同好会ROUTE
【インタビューに答えてくれた方々】
羽仁 一晃さん (工学部機械・エネルギー3年、部長)
武谷 充謙さん (工学部知能情報工学科4年、設計)
小野 翔也さん (工学部知能情報工学科4年、回路)
チーム紹介・マシンの特徴

羽仁一晃さん
ミスミ:部長の羽仁さん、まずはチームの紹介をお願いします。
羽仁さん:ロボコン同好会ROUTEは大分大学の学部生で活動しています。工学部の機械系と知能情報系の学生が中心となって作業を進めています。僕たちはNHKロボコンと相撲ロボットに参加し、優勝することを目標に活動しています。また、大会に参加するだけでなく、地方で開かれているものづくりの企画に積極的に参加して、地域住民にものをつくる楽しさと喜びを伝える活動をしています。
ミスミ:役割分担を教えてください。
羽仁さん:ロボットごとにハード設計、回路、プログラムに分かれています。ハード設計は非常に重要になるため、2~3人で綿密に話しあい時間をかけて行います。回路は基板の設計と、設計した基板の製作に担当を分けています。プログラムは1人で行うことが多かったです。それらとは別で、必要な部品を加工するという役割もあります。
ミスミ:マシンの特徴を教えて下さい。
羽仁さん:自動ロボットは、センサーを利用してラインをトレースし、白線の上をロボットが走行することや、フィールドに置かれているサークルをセンサーで感知し、自動でアームをのばして持っているオブジェクトを指定の場所においてくれます。手動ロボットはものを掴むためにアームを伸ばしたときにたわまないように糸でアームを吊り上げられるようにしています。
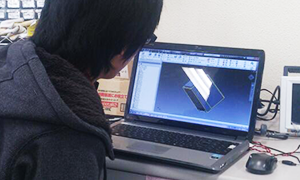
設計を行うメンバー
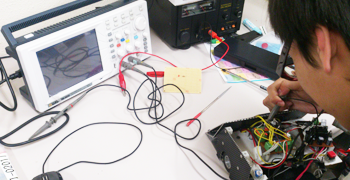
回路のチェックを行っているところ
前回大会への取り組み
ミスミ:小野さんにおききします。前回の大会で工夫した点を教えてください。また苦労した点はありましたか?
小野さん:ロボット相撲の大会ではロボットの完成度だけでなく、プレイヤーのスキルがとても重要になってきます。ロボットのブレードの取り付け方によって、相手のロボットをすくえるかどうかが変わってきます。そこで相撲ロボットの強豪校を見学させてもらい、ブレードの調整の仕方を教わりました。あとは審判の仕切りの合図に自分がどう合わせられるかが重要となるので大会前に何回も練習しました。
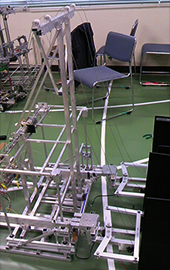
自動ロボット
ミスミ:武谷さんはいかがですか?
武谷さん:少ない人手で、ロボットを早く製作できる事を重視して、すべてのロボットの機構を極力似た形にしました。例えば、手動ロボットと自動ロボットのアームで同じ様な機構を採用しました。同じパーツをつくることで作業の効率化をはかり、プログラムや回路設計もしやすくなりました。また、機体を左右対称にすることで同じ部品を加工することが多くなり、作業速度が上がりました。
また、過去の大会では、耐久性を重視して骨格にパイプを利用してきました。今回は、軽量化するために板を採用しました。必要荷重を見て、板とパイプを使い分けた事によって軽量化ができました。
小野さん:当初は、回路を1枚作成するのに、すごく時間がかかっていました。原因は、回路設計の時に、ショートしないことを気をつけすぎて必要以上に慎重に設計をしてしまったことにありました。慎重さはとても大切なことですが、時間がかかりすぎて、他の作業にとりかかれないので回路を少し簡略化しました。そうすることで1枚つくるのに10分短縮できました。試作用も含めかなりの枚数をつくったので、この10分の短縮はとても大きいものとなりました。全体を通してですが、簡略化し作業時間を短縮しようとするときに、どの程度まで簡単にしてもよいか考えるのに苦労しました。
ミスミ:前回の大会は統括するとどのような大会でしたか?
羽仁さん:自分達が中心となって、進めていく事の大変さを感じた1年でした。いままでひっぱってくれていた先輩たちが卒業し、人手が足りない中でどのように効率よく作業を進めていくかがとても大切となりました。すごく凝ったものをつくるのではなく、与えられた課題をクリアするのに一番シンプルであるものを探しました。そうすることで完成するのに必要な時間と手間を減らすことができました。大会には技術はあっても時間とコストの計算がしっかりできないといけないと思いました。人手が少なかったからこそ、こうしたことの大切さをとても深く実感できました。
部品調達について
ミスミ:どのように部品調達をしていますか?
羽仁さん:ネットやカタログをみて商品を注文したり、お店にいって直接商品をみて購入したりしています。大会や他大学との交流会で興味をもったパーツはかえってすぐにチェックしたりして購入を検討します。

部品調達
ミスミ:昨年度の学生ものづくり支援では、どのようにミスミの部品を選びましたか?また、利用した感想を教えてください。
羽仁さん:送っていただいたカタログとeカタログを見て選びました。eカタログはカテゴリ別にわかれており商品が探しやすく、注文もとても簡単だったと感じました。購入したいものが決まっているときはこちらを使用しました。カタログはまだ購入したいものが明確ではない時にロボットに使えるものがあるかどうかを探すときに使いました。
ミスミ:利用した感想を教えてください
羽仁さん:とても見やすかったので商品を見るのが楽しかったです。
使用したミスミ部品
ジュラルミンフリープレート
- 型式:
- A2017P-4F-BSXA-NNL-200-200-3-BTR
- 利用箇所:
- 相撲ロボットの底板
軽くて強く寸法もたくさん選べます。
汎用アルミフレーム 角パイプ
- 型式:
- HFHQ4080-2-2000
- 利用箇所:
- ギアボックス
寸法の指定が細かく、大きいものまであるので必要なサイズが選びやすかったです。
ラックギア
- 型式:
- RGEAM1.0-500-N
- 利用箇所:
- アームを伸ばす機構
歯車がとてもスムーズに回りました。

汎用アルミフレーム 角パイプ
(ギアボックス)
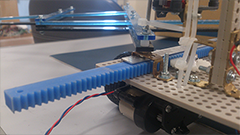
ラックギア
(アームの開閉)
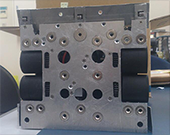
ジュラルミンフリープレート
(相撲ロボットの底板)
今後の目標
ミスミ:最後に、今後の目標について教えてください。
羽仁さん:NHKロボコンの本戦出場を目指します。いままで地道につみあげてきたものを生かして審査に受かるようにがんばります。そして自分たちが大会でテレビにでてそれを見た人たちが自分もこういう活動をしてみたいと思わせるようなロボットを作りたいです。自分たちが楽しむことも大切ですが、地方のイベントにでたりすることでみんなで、ものづくりを楽しむことが大切だと思いました。