支援団体インタビュー
2013年度
松江工業高等学校
ロボット研究部
【インタビューに答えてくれた方々】
渡部 海雄士さん (電子科2年、リモコンロボット操縦者、副部長)
山本 円海さん (電子機械科2年、作戦指示、操縦者補助)
清山 慎吾さん (電子機械科1年、自立ロボットプログラム・整備)
高橋 亮太さん (機械科1年、リモコンロボット整備)

チーム紹介・マシンの特徴
ミスミ:副部長の渡部さん、まずはチームの紹介をお願いします。
渡部さん:毎年20名程度が在籍して活動しています。本校には、建築都市工学、電気、電子、情報技術、電子機械、機械の計6学科がありますが、全ての科に部員がいます。毎年部員を上級生と下級生の組み合わせで4チームに分けて、それぞれのチームで競っています。その中で、私たち機龍「草薙」チームは、島根県予選を1位で通過して全国大会に出場しました。うるさい2年生と、もの静かな、でも時々とんちんかんなことをする1年生の組み合わせは、チームワークも良く、毎日部室に笑いを絶やさなかったです。
渡部海雄士さん
ミスミ:役割分担を教えてください。
渡部さん:私たちが参加している高等学校ロボット競技大会は、毎年開催県が変わり、ルールもその県にちなんだものとなります。毎年4月にルール発表があり、まず部員全員で競技するコートを製作します。その後チーム分けをし、各メンバーの役割分担を決めます。とりあえず試作機ができるまではメンバー全員で製作に取り組みます。
私たちのチームは2年生2名、1年生2名のチームでしたので、2年生が1年生を指導しながらロボットを製作しました。1年生は様子もよくわからないので、今年は整備や回路製作、プログラムを担当してもらい、経験を積んでもらうようにしました。操縦者は、顧問の先生が練習を見て決定したそうです。
ミスミ:マシンの特徴を教えて下さい。
渡部さん:創部以来、機龍というシリーズ名を付け、その後の名前がチーム名です。「草薙」というチーム名と蛍光ピンクの機体を先輩から継承して使用していて、この名前のチームは毎年全国大会に出場しています。
複雑な機構や加工は苦手なので、マイコンによる制御で加工技術の未熟さを補っています。今年のロボットは、リモコン型はDCモーター12個、エアシリンダー7本、自立型はDCモーター4個をSeeeduinoMega (Arduino互換) で制御しています。プログラムは先輩たちが作ったものを改良しながら使っています。動力源は、リモコン型はリチウムポリマー電池とエアー、自立型はリチウムポリマー電池です。
前回大会への取り組み
ミスミ:前回の大会で工夫した点を教えてください。また苦労した点はありましたか?
渡部さん:競技時間は毎年3分間なのですが、例年全国大会の上位は満点が当たり前で、時間勝負になります。今年の競技の目標時間を1分強と設定し、それを目指して製作しました。回転する部分はモーターを使用、前後や上下する動きはエアシリンダーを多用しました。また、時間短縮を図ると操縦ミスが多発したので、各セクションで動作する箇所を限定したり、シーケンス動作となるようにマイコンのプログラムを改良しました。あと、時間短縮のために各部位のスピードアップをしましたが、故障が多発したので1試合完了ごとのメンテナンス項目をリストにして整備担当が実施するようにしました。

山本円海さん
ミスミ:山本さんはいかがですか?
山本さん:コート上を数区間に分けて、各区間に要する時間を設定して操縦者に作戦や指示を出しました。また、緊張している操縦者をメンタル面でも支えました。操縦者は操縦に集中しているため、試合中はごく一部しか見えていません。集中している状態で、全体として何が起きているのかを理解し、必要な情報や操作を指示することは非常に神経を使いました。ただ、小中学校の同級生なので非常にやりやすかったです。

清山慎吾さん
ミスミ:清山さんはいかがですか?
清山さん:私は自立ロボットを主に担当しました。見たこともないプログラムを理解し、必要な箇所を変更することにはやりがいを感じましたが、自立ロボットがミスしてしまうと再スタートになってしまうので、毎試合プレッシャーを感じました。基本的にはC言語なのですが、情報の授業で習う前に使用する必要があり、何度もコンパイルエラーが出てしまいました。どうしようもない時は顧問の先生に泣き付きましたが、段々と理解できるようになると、面白いと思うようになりました。
高橋亮太さん
ミスミ:高橋さんはいかがですか?
高橋さん:リモコンロボットの製作とメンテナンスを担当しました。今まで見たこともない部品や工具がたくさんあり、先輩や先生から言われたものを探すことから始まりました。中学のときもロボット製作をしていて、チューンUPされた自動車も好きなので、自分では同じ1年生の友達と比べると知識はあるほうだと思いましたが、高校では比べ物にならないくらいの高いレベルの制御・製作技術でした。私のメンテナンスが不十分だと、試合が止まってしまうので、清山君と同じくプレッシャーがかかりました。
ミスミ:前回の大会は統括するとどのような大会でしたか?
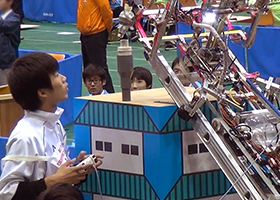
渡部さん:全国大会の会場では、主電源回路の断線があったり、1回戦で自立ロボットの制御がうまくいかず再スタートとなったり、と波乱だらけのスタートでしたが、チーム一丸となって対処したおかげで、準決勝・決勝とコマを進めることができました。決勝では自分達より約30秒速いチームもありましたが、冷静にミスなく操縦や制御ができ、結果6位入賞、敢闘賞受賞となりました。元々目立つカラーリングですが、機構も独特なので、たくさんの人に写真を取られたことがうれしかったです。

全国大会会場での機龍「草薙」チーム

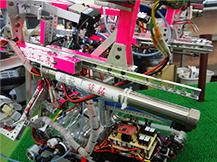
部室でロボット製作をしているところ
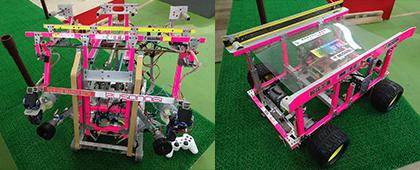
ロボット (左:リモコンタイプ、右:自立タイプ)

敢闘賞を受賞
部品調達について
ミスミ:どのように部品調達をしていますか?
渡部さん:大部分は市内のホームセンターで購入しています。それ以外の入手しにくい物はネット通販か地元の商社に発注を、その中でも特に産業機器用の部品や急ぎの物はミスミさんから購入させていただきました。
ミスミ:昨年度の学生ものづくり支援では、どのようにミスミの部品を選びましたか?また、利用した感想を教えてください。
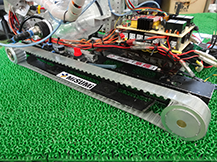
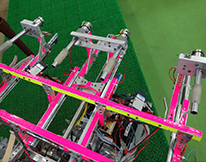
渡部さん:昨年度の目標は、信頼性と数年にわたって使用可能な洗練された走行系を作り上げることでした。その中で、クローラー型の走行系を選択しました。従来は丸ベルトを使用していましたが、ベルトがプーリーから外れることやプーリーとベルトが滑ってしまうという欠点がありました。実際に走行させると、予想以上のグリップ力で大満足でした。タイヤで走行させると、コートの微妙なうねりや段差でまっすぐ走らないものですが、タイミングベルトはきれいに直進したので、感動ものでした。結局私たちと同じ走行系を、部内の他チームも使用することになりました。
使用したミスミ部品
搬送用タイミングベルト
- 型式:
- TTBU1100T10-250
- 利用箇所:
- 走行系
走行系のキャタピラ代わりに使用しています。予想以上にグリップ力がよく、かえってグリップ力を落とす工夫が必要でした。
タイミングベルトプーリ (ドライブ側)
- 型式:
- TTPA18T10250-B-H12-FC57.5
- 利用箇所:
- 往復運動部
このプーリをモーターのφ6軸に付けられるようにする工夫が必要でした。この部品はフランジが地面に当たらないようにフランジカット加工して納入してもらいました。
タイミングプーリ (ドリブン側)
- 型式:
- AHTFW18-T10250-15-FC57.5
- 利用箇所:
- 滑り止め
ベルト外れ防止のため、取り付け穴を長穴とし、テンションが張れるようにしてあります。このプーリーのフランジもカット加工をしてもらいました。
走行系
(搬送用タイミングベルト等)
往復運動部
(エアシリンダー)
滑り止め
(ウレタンカラー)
今後の目標
ミスミ:最後に、今後の目標について教えてください。
渡部さん:近年高校のロボット競技大会では、対象物や障害物の種類が多く難易度が高くなりつつあります。そうなると機構も増え、結果重量増加に繋がっていきます。私たちも制御基板の小型化やバッテリーをリチウムポリマーにするなどの対策を行い軽量化をしてきました。しかし構造部品やその材質の見直しをしなければこれ以上の軽量化は難しくなっています。私たちの活動資金も限りがあるので、効果の出やすいところを絞って対策をするつもりです。
また軽量化や小型化は使用エネルギーの削減すなわちエコに繋がると考えます。勝負にこだわる姿勢は変えませんが、これからはエネルギーのことも頭の片隅においてロボットを製作したいと思います。今回以外に、本校は5位を3回とっていますが来年度こそは頂点に立ちたいと思います。