支援団体インタビュー
2013年度
東京工芸大学
ロボカップサッカープロジェクトRV-Infinity
【インタビューに答えてくれた方々】
松下 健嗣さん (電子情報工学専攻 (修士) 2年、プロジェクトリーダー)
山田 翔太さん(電子機械学科4年、画像認識担当)
八十原 良隆さん (電子機械学科4年、駆動システム担当)
松田 治さん (電子機械学科4年、ボール処理機構担当)

チーム紹介・マシンの特徴

ミスミ:プロジェクトリーダーの松下さん、まずはチームの紹介をお願いします。
松下さん:東京工芸大学にはロボット相撲やマイクロマウスに参加している「からくり工房」というロボット製作サークルがあります。その顧問の先生の研究室、ロボットビジョン研究室のメンバーを中心に、サークルの上級生も加わって活動しているのが、ロボカップサッカープロジェクトチーム「RV-Infinity (2013年大会まではKoogei-RV) 」です。現在は学部3年生~修士2年生までの合計11名で活動しています。プロジェクト名にもあるように世界的なロボット競技大会「ロボカップ」のサッカー競技大会に出場して優勝することを目標としています。
ロボカップサッカーは、人間のサッカーの試合と同じく、自分で考えて動く自律移動型ロボットを使った競技会形式で行われます。 様々なリーグがありますが、RV-Infinityは12×18mの一番広いフィールドで競技を行う中型リーグに5年間参戦しています。2013年に東京で開催された日本大会では準優勝し、さらにプレゼンで技術を競うテクニカルチャレンジでは第一位になりました。RV-Infinityの最大の特徴は開発スピードの速さです。昨年までは毎年フルモデルチェンジを行っていて、他のチームからも「あり得ない」とよく言われます。パーツはCNC等で全て自作しているので、ちょっと改良のアイデアが浮かんだら、すぐに試作してみて形にするのがRV-Infinity流ですね。
ミスミ:役割分担を教えてください。
松下さん:ロボカップサッカー中型リーグは5台のロボットが必要になります.リーダーを除く残り10名が2人1組で各ロボットの担当に付いています。各担当は担当ロボットのメンテナンス等のハードウェア担当とパラメータ調整等のソフトウェア担当に分かれています。これとは別に開発班があって、制御プログラムを組むソフト班と様々な回路を設計・製作する回路班、ハードウェアの製作を担当するハード班に分かれています。それぞれの班の中でもさらに担当が細かく分かれていて、例えばソフト班でも特にカメラ関連の認識系のプログラムを組む画像認識担当があったり、ハード班にも駆動系を担当する人やボールを蹴るキック機構等を担当する人に分かれます。各担当が週一回のミーティングで報告を行い、他の担当者も交えた議論をしながら開発を進めています。
ミスミ:マシンの特徴を教えて下さい。
松下さん:RV-Infinityのロボットの特徴はいろいろあるので、代表的なものを各担当から説明してもらいます。
山田翔太さん

八十原良隆さん

松田 治さん
山田さん:画像担当としては、自己位置同定方法に特徴があると思っています。ロボカップロボットは競技中に人間が一切操縦しない自律ロボットなので、常に自分のフィールド内での位置を認識しないといけないのですが、これがとても難しい。基本的には全方位カメラでフィールドに描かれている白線を画像認識して自分の位置を推定しますが、普通にやるととても長い時間が掛かってしまいます。RV-Infinityではその推定に研究でも使用される最適化手法を取り入れてリアルタイム性を確保しているんです。
八十原さん:さらに画像だけで推定が困難な場合は、駆動システムのモータ情報から進んだ距離を推定して自分の位置を決めるサブシステムがあります。ロボカップでは全方向移動機構という姿勢を変えずに全方向に移動可能な特殊駆動系を使用するので、普通の車輪型ロボットよりも推定が面倒ですね。駆動系のもう一つの特徴としては、駆動力と重心安定性を重視して4輪の全方向移動機構にしている点でしょうか。オムニホイールという車輪が全て接地する必要があるので、独自にサスペンション機構を組んでいます。
松田さん:ボール処理機構にも特徴があります。ボール処理機構は大きく分けてシュート時にボールを蹴るキック機構とドリブル時にボールをこぼさないようにする保持機構があります。ボールとの接触部分は滑らないようにシリコン製の自作タイヤを使用していますが、実はサークルで出場しているロボット相撲で使用するタイヤにヒントを得ていたりします。

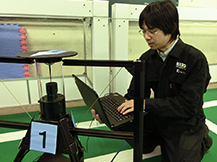
ロボカップジャパンオープン
2013東京での試合前調整の様子

ロボットの外観
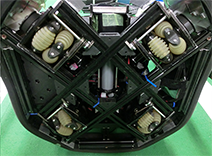
ロボットの裏側
前回大会への取り組み

ミスミ:前回の大会で工夫した点を教えてください。また苦労した点はありましたか?
松下さん:各モジュールの工夫点の説明は各担当に任せるとして、チーム全体に関しての工夫はロボットの規格化でしょうか。今まではオフェンス機・ディフェンス機・ゴールキーパー機がそれぞれその機能に特化した構成になっていたのですが、前回大会ではロボットの基幹部分の構成を小型化して全台共通仕様に設計し直しました。共通仕様化した事によってメンバー間での調整のノウハウ蓄積が可能になりました。ついでに予備パーツ数も減り、整備が楽になったのも良かったです。
毎回ロボットのフルモデルチェンジを行ってきた過去4回の大会経験から、やっとソフト・ハードともに最終形が見えてきたのでこういった一見地味だけど重要な部分に取り組めたのだと思っています。
ミスミ:山田さんはいかがですか?
山田さん:画像認識では緑色のサッカーフィールドから白線を抽出して自分の位置を認識する自己位置推定を行いますが、この処理に関連するパラメータは非常に多く、しかも大会会場の光環境に合わせてその場で調整する必要があります。これらの作業を軽減するために前回大会ではプログラムのユーザーインターフェース部分を大幅に改良しました。今までの膨大なプログラムを全体的に書き換えることになったのでとても大変な作業でしたが、大会での調整の作業性がかなり向上したので良かったです。
ミスミ:八十原さんはいかがですか?
八十原さん:整備性の向上と軽量化に力を入れました。配線処理とメンテナンスのし易さを試行錯誤で改良したおかげで、競技中の慌ただしい作業でもミスが減りました。さらに剛性をギリギリまで落として30%程度軽量化したので調整時の移動等も楽になり試合前調整の作業性が向上しています。
ミスミ:松田さんはいかがですか?
松田さん:前回大会で最も力を入れたのはボールをシュートするキック機構の改良です。ボールの打ち出しにはソレノイドを用いているのですが、一瞬で大電流を流して強大なパワーを放出するためには機構の最適化が必須です。コイルの径、巻き数や鉄芯の素材、長さ、ストローク、先端形状等の様々な要素を1つずつ膨大な検証実験により決定していきました。苦労の結果、人間でも反応が難しいキックを打ち出せる機構が出来上がったので良かったです。
ミスミ:前回の大会は統括するとどのような大会でしたか?
松下さん:ロボカップは出場ロボットを作るのがとても大変なため、参加するためにまず大きなハードルがあると言われています。RV-Infinityも最初の1、2年は何とか組み上げて大会会場に持って行くのが精一杯で、全く思った様に動作しませんでした。
5年目にしてようやくソフト・ハードともに基幹部分の完成まで辿り着きました。安定性・整備性・作業性に力を入れられるようになってきたことがそれを物語っているのだと思います。RV-Infinityの特徴の1つは開発スピードですが、ただ闇雲に速いだけではありません。チーム内の頻繁なミーティングで問題点を正確に把握して、国内・海外の他チームも参考にしながら次々に改良を実機ベースで重ね、問題点を着実に潰していく改良システムがしっかりチーム内に根付いてきています。前回大会は準優勝と一歩及びませんでしたが、次回に繋がる結果として満足しています。

部品調達について
ミスミ:どのように部品調達をしていますか?
松下さん:基本的に調達する部品の種類によって、過去の実績からある程度決まった場所で購入しています。今利用している調達先全般に言えることは、納品日が早くて予定通りに到着する点ですね。大会間際は特に非常に早いペースで開発が進むので、予定通りに部品が調達できることは開発スケジュール的に最重要項目です。また、開発ミーティングでしっかり議論して型番まで詰めてから発注するので、ホームセンター等の店舗に行って探すという方式はあまり取らず、主にWeb発注しています。
ミスミ:昨年度の学生ものづくり支援では、どのようにミスミの部品を選びましたか?また、利用した感想を教えてください。
松下さん:ミーティングでは紙カタログを机に広げて部品選定を行います。ミスミは部品点数が豊富でカスタマイズの幅が広いので、どんなアイデアが出ても欲しい部品があるので大変助かります。また、発注から納品までが完全に管理されていて、必ず納品日に届くのが魅力ですね。
使用したミスミ部品
アルミフレーム / 安全保護材 D型ゴム
- 型式:
- HFSB5-2020-2000 / PRGDM-1500
- 利用箇所:
- ロボット骨格 / ロボットバンパー部
アルミフレーム材はロボットの骨格として使用しています。RV-Infinityではフレーム材同士の連結パーツをCNCで自作しているので、完全に規格化され、しかもバリエーションの多いフレーム材はとても重宝しています。また、ロボカップではロボット衝突時の安全対策として緩衝材の装着が義務付けられているので、D型ゴム材は最適です。
メカロック / タイミングプーリ / タイミングベルト
- 型式:
- MLR12 / HTPB24S5M100-A-H20 / HTBN255S5M
- 利用箇所:
- 動力伝達部
動力伝達部は全てミスミの部品で構成されています。重量20kgもあるロボットをかなりの速さで駆動するモータの出力は1つ当り150Wもあり、この大きなパワーを伝達するには相応の部品が必要となります。ミスミには大きな動力伝達にも使用できるパーツが数多く揃っているので、必然的に全てがミスミの部品になりました。
ヒンジピン
- 型式:
- SHCCGH6-93.0
- 利用箇所:
- サスペンションホルダ
駆動システムのサスペンション部分にベアリングと一緒に使用されています。ミスミのヒンジピンはmm単位での寸法指定発注が可能なので加工の手間が無くとても助かります。

アルミフレーム(ロボット骨格) /
安全保護材 D型ゴム
(ロボットバンパー部)
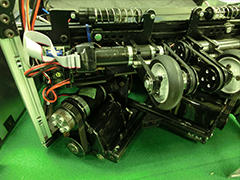
メカロック / タイミングプーリ /
タイミングベルト
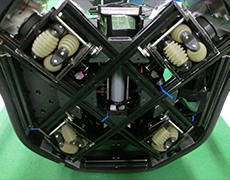
ヒンジピン
(サスペンションホルダ)
今後の目標
ミスミ:最後に、今後の目標について教えてください。
松下さん:前回大会までの開発でやっと安定して思い通りに動いてくれるロボットが出来上がってきました。今後はロボカップの主旨でもある知能的な行動を組み込んでいくフェーズに移っていくのでとても楽しみです。まずは日本大会での優勝、そして世界大会への出場を目指して、着実に技術を積み重ねながらステップアップしていきたいですね。