支援団体インタビュー
2013年度
新潟大学
科学技術研究部
【インタビューに答えてくれた方々】
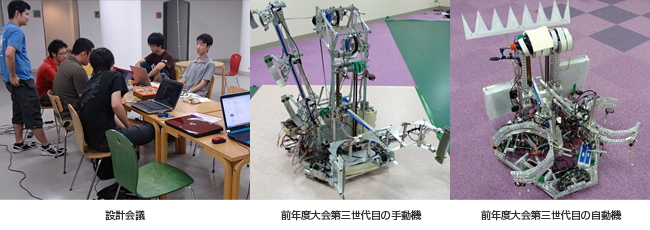
佐藤 竜一さん(工学部・機械システム工学科・3年・チームリーダー)
中村 美里さん(工学部・機械システム工学科・3年・前年度大会自動機総合設計者)
堀川 秀司さん(工学部・機械システム工学科・3年・前年度大会手動機総合設計者)
今井 啓太さん(工学部・電気電子工学科・2年・部長兼プログラマー)
小野寺 史弥さん(工学部・機械システム工学科・2年・前年度大会手動機設計者)

チーム紹介・マシンの特徴
ミスミ:佐藤さん、まずはチームの紹介をお願いします。
佐藤さん:私たち科学技術研究部は、NHK大学ロボコンで優勝することを目標に活動している団体です。
新潟大学工学部の機械システム工学科、電気電子工学科、福祉人間工学科、情報工学科という4つの学科の1~3年生、13人で構成されています。
私たちはNHK大学ロボコンに3回連続で出場を果たしており、2011年度大会ではベスト4進出という好成績を収めました。
ミスミ:役割分担を教えてください。
佐藤さん:チームメンバーは、大きく分けて機械班と電装班の2つのグループに分かれています。機械班はロボットの設計、製作を電装班は基盤の作成、ロボットの制御などを行っています。
ミスミ:マシンの特徴を教えて下さい。
佐藤さん:私たちのチームは発足してからあまり時間が経っていないので、「良いマシーンとは何か」を模索している状態です。
まだ特に決まった特徴はありませんが、他校のロボットなどから学び、より良いと思われる 機構など新たなものをどんどん取り入れたロボットになっています。
前回大会への取り組み
ミスミ:前回の大会で工夫した点を教えて下さい。又苦労した点はありましたか?
堀川さん:私は前回大会(NHK大学ロボコン2013大会)で手動機の設計と操縦を担当しました。
手動機の設計で工夫した点は、アイテムを一度にたくさん回収できる機構にしたり、足回りに全方位移動車輪(オムニホイール)を採用し任意の方向に素早く移動できるようにしたりして、各課題を達成するのに必要な時間をとにかく短縮できるように気を付けたところです。
設計段階から機体の動かし方を入念にイメージし、どうすればより速く、よりスムーズに課題を達成することができるかを考えて設計・製作を行いました。
また、この手動機は大会期間中に何度かバージョンアップを行っており、全国大会に出場したときの機体は機械班のメンバー数人で機構ごとに設計を分担して製作しました。それまでは設計者一人が機体一台を担当し、全体を統括して製作をしていたので、分担しての設計という試みも工夫した点だと言えます。しかし、設計を機構ごとに分担したことにより、一台の機体としてまとめる段階で他の部分と干渉する場所が発生してしまうなど、新たな問題もたくさん生じました。
そのようなときには、各機構の設計者とよく話し合いをして、機構の形を変えたり部品を減らしたりすることができる場所を探し、干渉箇所を無くす作業に尽力しました。
また、この手動機にはタイミングベルトやラックを用いた昇降機構に加え、新たな試みとして平ベルトを巻き取りアームを稼働させる機構を採用しました。
新しく取り入れた機構であるため、電気的な制御できちんと位置決めをすることが難しく、操縦するときにはボタンを押す時間で位置を調整しなければならなかったので大変でしたが、練習を重ねることで感覚を掴み短時間でタスクをこなすことができるようになりました。
ミスミ:佐藤さんは如何ですか?
佐藤さん:2013年のロボコンのルールでは、約6m離れた場所にある月と呼ばれる円板の上に苗木と呼ばれるアイテムを飛ばして乗せるというものがあり、私はこの発射機構と苗の製作を担当しました。
私たちのチームにはまだ物を飛ばす機構のノウハウが無く、様々な試作機を設計、製作し、実験をしました。特に苦労したのは、成功率を上げることです。毎回同じ場所に着地させることができるように、苗木の重さや、衝撃吸収材などを少しづつ変え、何度も実験を重ねて記録し、成功率が上がるよう努力しました。
ミスミ:中村さんは如何ですか?
中村さん:私は自動機の設計を担当しましたが、ルール発表当初は手動機の設計担当でした。しかし、設計することが初めてであったため設計を完了させることができず、リーダーに設計を変わってもらい、冬の期間はずっと加工に徹しました。その後、3月中旬から自動機の設計を担当しました。
設計では、機械要素を知っているからといってすぐに設計できるわけではないので、昇降やスライダ部分、アームは先輩方が昨年作った機体を見て勉強しました。しかし、同じロボットを作るわけではないので、自分なりに改良していくところで苦労しました。
また、全体的に人数が少ない部活なので、設計や加工で何日も大学に泊まりこんで、睡眠不足の中作業したり講義に出席したりしなければならなかったのがとてもつらくて苦労しました。
ミスミ:今井さんは如何ですか?
今井さん:私は手動機の電装を担当しました。その当時私はまだ一年生で、先輩方の作成したプログラムソースの雛形や基板を用いており、設計の根幹には携わりませんでした。
しかし、出来上がった機体のアクチュエータ数は想定を上回っており、本来ブラックボックス化させておく予定だった、PLDの論理合成やマイコンのAPIの変更をした点が最も技術的に工夫した点です。
また、タスクを迅速に行うために、一部自動化を図りました。これにはエンコーダやポテンショメータからの情報を元にPID制御によって高速かつ安定した動作を実現しました。
ミスミ:小野寺さんは如何ですか?
小野寺さん:私は第2世代目の手動機に搭載していたアームと第3世代目の手動機に搭載してあるアームを設計しました。
第2世代目のアームに関しては1500mm離れた位置のリング内にアイテムを置かないとならなかったのでなるべく軽いものになるように設計しました。
第3世代目に関しては伸ばす必要はなくなりましたが、フィールドに置かれているアイテムを二段に積み上げ自動機に渡せるようアイテムの間を近づけないとならなかったので、その点に苦労しました。
ミスミ:前回の大会は統括するとどのような大会でしたか?
堀川さん:私達のチームはNHK大学ロボコン2013大会に出場することはできましたが、予選リーグ敗退という結果に終わってしまいました。
前回大会を振り返ってみると、ロボット製作に関して技術面では他のチームにも負けないものがあったと感じています。しかし、チームのメンバーひとりひとりのモチベーションの維持や、製作スケジュールの管理体制など、チーム全体で見てみるとまだまだ劣る箇所が多くあったように思います。
私達のチームは約10名のメンバーで活動しており、ロボコンチームとしては比較的人数が少ないチームになります。そのため、特定のメンバーに仕事が集中してしまい、設計・製作の遅延が発生することが多々ありました。そのようなときにはチーム内でミーティングを開き、仕事の分担の見直しをしたり、仕事の優先度を確認したりして、期日までに仕上げるためにはどうすればよいかを話し合いました。
少人数のチームであるため、個人の仕事量が多く大変だと感じることもありましたが、チームワークで乗り切ることができる良いチームだったと思います。

部品調達について
ミスミ:どのように部品調達をしていますか?
佐藤さん:私達のチームではモータや空気圧シリンダなどのアクチュエータ、歯車やベルトなどの機械要素を主にインターネットで注文して購入しています。
ミスミではタイミングベルトとプーリ、チェーンとスプロケットなどの動力伝達部品、リニアガイドやベアリングなどの摺動部に使う部品、定荷重ばねやコイルばねなどのスプリング部品を購入しています。
ミスミ:昨年度の学生ものづくり支援では、どのようにミスミの部品を選びましたか?
佐藤さん:昨年度の学生ものづくり支援では、ロボットの機構の中でも特に使用する箇所の多いタイミングベルトとプーリを中心に部品を選びました。
競技用ロボットは製作する部品も比較的小さなものが多く、狭いスペースに複雑な機構を設置しなければならない場合があるため、小型な部品で歯数やベルトの長さが調整しやすいミスミの製品はとても使いやすく重宝しています。
また、昇降機構に不可欠な定荷重ばねも何種類か選びました。定荷重ばねは他のサイトでは買えないものなのでミスミで購入しています。ミスミで部品を購入するときは、最初に紙のカタログで欲しい製品があるかを探し、使いたい仕様を満たしていそうなものがあればインターネットで細かく条件を指定して探すようにしています。
ミスミの製品は低価格・高品質で耐久性があり、何度も練習をしてロボットを動かしていても問題なく使用できるところが素晴らしいと思います。
使用したミスミ部品
プーリ
- 利用箇所:
- 昇降機構
小型な部品で歯数を調整しやすいため、とても使いやすく重宝しています。
また低価格・高品質で耐久性があり、何度も練習をしてロボットを動かしていても問題なく使用できるところが素晴らしいと思います。
スプロケット
- 利用箇所:
- 機構移動の動力部
小型な部品で歯数を調整しやすいため、とても使いやすく重宝しています。
また低価格・高品質で耐久性があり、何度も練習をしてロボットを動かしていても問題なく使用できるところが素晴らしいと思います。
定荷重ばね
- 利用箇所:
- 昇降機構
小型な部品で昇降機構に不可欠であり、とても使いやすく重宝しています。
また、ミスミでしか購入できないため、とてもお世話になっています。

今後の目標
ミスミ:最後に、今後の目標について教えてください。
佐藤さん:今年度は本戦出場はできたものの、予選リーグ敗退という結果になってしまいました。
来年度は今年度の反省を生かし、より速く、より確実にタスクをこなせるロボットを作っていきます。そして、今年度のNHK大学ロボコンでは上位入賞を目指します。
また、自分たちが築いてきた、技術と知識を後輩たちに伝え、後輩たちがより良いロボットを作っていけるよう努力していきたいです。
ミスミ:この度はインタビューにお答えいただき、ありがとうございました。