![]()


INTERVIEWS
インタビュー
第38回大会 ミスミ賞
NEXUS / 広島工業大学Hit-Robotics
- 尾田 俊佑(おだ しゅんすけ)さん

プロジェクト開始から2年で完成させた『NEXUS』
部内に先輩がおらず、顧問の先生も二足歩行ロボットは専門外という環境で、ミスミ賞を受賞する『NEXUS』を作り上げた尾田さん。対面での交流が難しい中、1枚のポスターを元に、Web上の情報交換を中心とした制作は、未経験からたったの2年弱で行われたというのですから驚きでした。
「ひたすらポスターを見て構造を理解しました」

ミスミ賞の受賞、おめでとうございます。
尾田さん:ありがとうございます。『NEXUS』を整備する台座や整備台に、ミスミさんのアルミフレームを使用しているので、今回の受賞はとても嬉しいです!
SNSでも発信されていますが、二足歩行ロボットを始められたのは最近なんですね?
尾田さん:大学が二足歩行ロボットの「ヒューマノイドロボットプロジェクト」を始めたのが2019年で、僕自身が制作するようになったのが2019年の後半です。
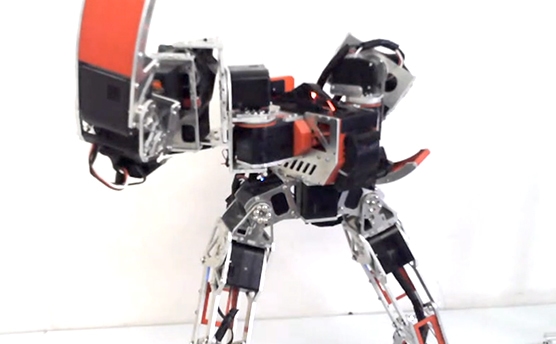
NEXUS
-
Concept
強くてかっこいいロボット
-
Weight
2980g
-
Height
440mm
-
Axis
サーボモーター23個
2019年ごろの尾田さんのロボットと『NEXUS』は全く別物と言える仕上がりなんですが、どうやって情報を得られたんでしょうか?
尾田さん:工大サミット*1というものがあるのですが、その中で開催されていたROBO-ONEのような格闘競技会で福岡工業大学の方と知り合い、僕のほうからいろいろ質問して、ロボットの作り方を教わりました。他にも『Serenadeus』の方*2にTwitterでアドバイスをいただいたり、YouTubeのROBO-ONEチャンネルをはじめとした動画で情報収集をして、短期間で完成させられました。ネットを始めとした周りの力が大きかったです。
早く結果を出さなければならない理由はあったのでしょうか?
尾田さん:僕は2021年4月で4年生になるのですが、二足歩行ロボットを作り始めてから卒業までの3年間で二足歩行ロボットを完成させて勝つ、というのが目標だったんです。限られた時間でどれだけ成果を出せるのかを第一に考えていたので、情報を集めまくっていました。
尾田 俊佑さん
『NEXUS』はどんなコンセプトで作られた機体なんでしょうか。
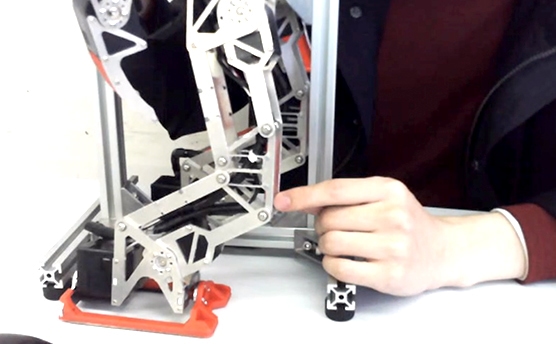
尾田さん:強くてかっこいいロボットを短期間で、というコンセプトで情報を集めていましたが、ロボットの構造をしっかり見ていかないと作れません。そこで元にしたのが、『Lupus』(第34回ミスミ賞)が大きく写った第35回ROBO-ONEのポスターです。肩の構造やサーボモーターの並び方などが一番見やすかったので、何度も見直して参考にしました。一度だけ、側面にタップを立てる板の厚みが3mmで大丈夫なのか確認するために、工大サミットに出場していた『Lupus』のパーツにノギスを当てさせてもらいました。

『NEXUS』の特徴を教えてください。
尾田さん:よくあるCNCフライス*3ではなく、レーザーカッター*4で部品を切り出しています。CNCが学校にないのに、レーザーカッターはなぜかあるんですよ。厚さ3mmのA5052をレーザーカッターで切るにはガスが多く必要なんですが、最近輸入が難しくなってきているようです。
今回『Nexus』を制作していく過程で、COVID-19の影響はありましたか?
尾田さん:前回のROBO-ONEが終わった時点で、機体はある程度完成していたので、特に製作に関して困ったことはないですね。ただ、レーザーカッター用のガスの輸入が難しいことから後輩たちがロボットを作ることができていません。もう1機制作途中だった機体は、今大会に出られませんでした。
苦肉の策で生み出した「横回転蹴り」
リモート大会は2回目の参加ということですが、いかがでしたか?
尾田さん:ダミーロボット相手で勝つためには、「大技」を多く成功させなければならないのですが、抱え上げて後ろに落とす“バックドロップ”のような技が『Nexus』にはできないので、難しかったですね。足の構造上、曲がる可動範囲に限りがあるので。オンラインでの競技より、僕の本心としては、ちゃんとロボット同士で拳を交えたいです。
“横回転蹴り”は中継上でも注目されていましたよ。
尾田さん:僕はモーションを作るのがそこまで得意じゃないこともあって、「大技」は“前方への回転蹴り”と“横回転蹴り”の2つしか作っていません。『NEXUS』にできる「大技」はこれしかないという思いで作ったもので、特に観客を魅了しようといった、強い意識があったわけではないですね。
機体構造と違い、モーションは見るだけで読み取るのは難しいと思うんですが、どう工夫されたんですか?
尾田さん:モーションに関しては一から、自分で作っていきました。情報も頂いていたんですが、文章だけでは伝わりにくいですし。動画をスローモーションにして何度も再生したり、ずっと部室にこもって研究してばかりでしたね。ゲームのように倒れずに攻撃できれば良いのですが、実機は倒れないように攻撃する、移動するのが本当に難しいところでした。その中で、パンチを前に出すときに、反対側の腕も反動を付けるために後ろへ動かしておく、といった工夫をしてみました。
相手を吹き飛ばすようなロボットを作ってみたい
リング上でのリアルな対戦はまだまだ未知の領域もたくさんありますね。
尾田さん:部内にもう1機3kg級の機体があるので、そのロボットを対戦相手というか、ダミー代わりに研究しています。しかし、実際に『Nexus』がリング上で戦った時にどれだけ倒せるのかは全くわかっていない状況です。
この大会後は『Nexus』をブラッシュアップしていく形ですか?
尾田さん:僕の持つ機体の改良案としては、足のピッチ軸にねじりバネを付けることでサーボモーターの負担を減らしたり、ジャンプ力や機動力を増やせるのではないかと考えています。また情報が収集できたり、弱点がわかれば改良できるんですが、実際にリアルでの交流が活発にならないとグレードアップが難しい状況まできましたね。これからの1年は、後輩に託していく1年にしようと考えています。
後輩は何人くらいいらっしゃるんですか?
尾田さん:11人いる中で3年生は僕1人です。ヒューマノイドプロジェクトが開始される前、ロボット研究部は人気がなくて、僕しかいない時期がありました。11人もいると部室に入りきらないので、困っているところではあります(笑)。
後輩は別の機体を作られているんですよね?
尾田さん:そうですね。後輩のロボットなんで僕が自慢するようなものではないと思うんですが、後輩の3kg級は手の先が挟み込むハンドになっていて、リンク機構を工夫して素早く開閉できるんです。そのほかまだ作っている途中ですが、ROBO-ONE Light規格の機体が2機います。
尾田さんが考える夢のロボットはどんなロボットですか?
尾田さん:もっと素早く動くことができるロボットですね。パワーも欲しいところです。高校時代にアメフトロボットや相撲ロボットをやっていた経験があるので、二足歩行ロボットはスピードやパワーが物足りないんですよ。倒れるか倒れないかの世界じゃなくて、相手をどれくらい飛ばせるか。そんなロボットを妄想してます(笑)。
後輩たちの活躍にも期待したいですね。
尾田さん:レーザーカッターのおかげで切削時間がかなり速いですから、トライアンドエラーはしやすいと思います。そこが強みになるかもしれません。後輩は僕よりも夢があって、いいロボットを作っていると思うので楽しみです。
- *1 ライントレース 床に示された線をセンサーで認知し、たどっていく技術。利用した自動運転カーなどによる競技会が開催されている。
- *2 第37回ミスミ賞『Serenadeus』制作者藤井昂佑さん。
- *3 エンドミルとテーブルの移動がコンピュータで制御された切削加工機械。
- *4 レーザー光による熱で非接触の切断や彫刻を行う機械。