![]()


INTERVIEWS
インタビュー
第37回大会 ミスミ賞
Serenadeus / SERENA Lab
- 藤井 昂佑(ふじい こうすけ)さん

「新しいことをするからこそ、自分がつくる意味がある」
ROBO-ONE本選、ROBO-ONE auto、ROBO-ONE剣道のすべてに対応した汎用機として藤井さんが制作した『Serenadeus』。時間がない中でも自身の納得できるメカを作ったというだけに、短期間で設計・制作されたとは思えない完成度を見せていました。『Serenadeus』へのこだわりを聞くと、藤井さんのものづくりへの思いがまさに凝縮されていました。
機体に対してのモチベーションは、“新しさ”

ミスミ賞受賞おめでとうございます。普段のお仕事はロボットに関係されているんですか?
藤井さん:ありがとうございます。普段は3Dプリンター関連のベンチャー企業に勤めています。ただ、仕事で使っているから趣味のロボットにも使っているというわけではなくて、どちらかというとロボットで3Dプリンターを使っていたから興味が大きくなり、関連の会社で働いているような形ですね。
Serenadeus /
SERENA Lab
-
Concept
汎用性を実現する万能プラットフォーム
-
Weight
2900g
-
Height
47cm
-
Axis
サーボモーター26個
ロボットづくりそのものはいつ頃からなのでしょうか?
藤井さん:出身校が神戸市立科学技術高校で、高校1年生からです。1年生のころは先輩から教わって機体を改造する流れが多いのですが、僕らの学年はかなり早めに技術の習得が進んだというところもあり、2年生になるころには、それぞれが自分のロボットを1機仕上げていました。ものづくり自体はそれ以前から好きだったので、電子工作などもしていました。
ROBO-ONEには続けて参加されていたんですか?
藤井さん:高校を卒業して社会人になってからはロボットを作る余裕がなくて。2019年の夏に『Serenadeus』のいわば「バージョン1」が出来上がり、それで各種認定大会だとかROBO-ONE剣道などに出ようとしていたんです。しかしどれも自分のスケジュールの都合上叶わず出られませんでした。今年になって仕事も落ち着いてきて、個人の時間も取れるようになってきたので、「バージョン2」を作ろうと思い立ちました。
37回大会に合わせて制作されたということでしょうか?
藤井さん:いえ、元々今回出るつもりではなくて。1か月前にロボットビルダーの友人から誘われたり、仕事も含め、出場できる環境がたまたま揃ったからというのがあって。「できるな、今なら」という感触があったので出場しました。出場を決めてから、設計ミスなどで途中から全部やり直し、みたいなトラブルもありまして…結果的に設計期間が1週間ほどの短期間になってしまったんです。8月の終わりから9月の初めの1週間で設計をして、それ以降が組み立てとかモーションの作成になりました。
そんなタイトなスケジュールでも2号機を制作されたのは?
藤井さん:僕自身のモチベーションは「新たな技術」とか「新たな試み」というのを搭載した機体を作っていくことが大きいんです。もちろん1つの機体を磨き上げていくのもいいんですけど、まだそれをするには、僕はまだ技術的にヒヨッコなので。「これが一番だろう」と思えるときまでは、新機体をバンバン作っていこうと考えています。そのスタンスは、タイトなスケジュールの中でも変わりません。

藤井さん

2年くらい温めていたものを、一週間で一気に形にした
フレームはすべて3Dプリンターで制作されてるんですか。
藤井さん:ベアリングやねじ以外の基本フレームは、ナイロンと、カーボンファイバーの短繊維が含まれている素材を3Dプリンターで出力しています。職場の設備を利用させてもらうことで、ミスなく短期間で高強度な部品を実現しています。
家庭用3Dプリンターでは作れないような部品もたくさんあるんですか?
藤井さん:家庭用3Dプリンターも今はかなり進化してきています。アルミレベルの強度を出そうとする場合だけ、産業用とかの3Dプリンターを使わないといけないのですが。ちゃんと時間をかけて設計をして、強度的に危ない部分を減らした設計ができるのであれば、家庭用3Dプリンターでも十分にできることはあるんじゃないかと僕自身は考えています。
3Dプリンターだからこそできる形というのは強みですよね。
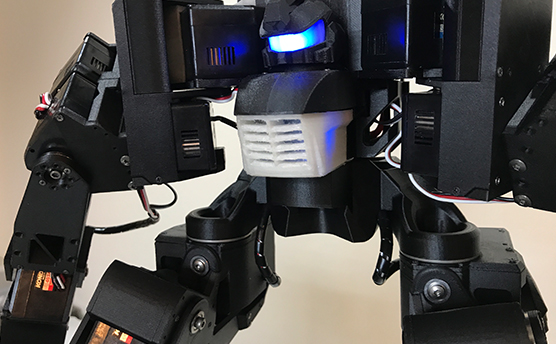
藤井さん:そうですね。例えば『Serenadeus』の腰部分なんかは、切削で実現しにくい形になっています。3Dプリンターは何度もトライすることへの心理的な障壁が低いので、パーツを小分けに印刷して、違ったなと思えばもう一回印刷…というように時間も少なく済みます。個人でモノづくりしている人間としては、設計から制作、組み立て、調整を全部やらなければならないので、僕自身は加工の部分で時間を取られたくないと考えているんです。なので、CADデータがダウンロードできて、品揃えのおかげで欲しい径がすぐ見つかるミスミさんのベアリングなどは、今後使っていきたいと考えています。
『Serenadeus』の構造的な特徴はどの部分になるんでしょうか?
藤井さん:足の部分です。初代ではピッチ2軸の普通の平行リンク足ではできない、キックのような動きや正座が可能な3軸を持つ平行リンク足を目指していました。しかし設計が煮詰まっておらず、3軸は達成しているものの可動範囲が狭かったんです。今回の『Serenadeus』は可動範囲を両立させながら、なおかつ強度も前の機体より向上させることを目的として、足を全体的に設計し直して取り組みました。
3軸の構想自体は、ずっと以前からお持ちだったんですか
藤井さん:3軸の足を作ろうと思ったのは、社会人なりたての頃から、もう2年ぐらい温めていたものです。頭の中にはずっとあって…ただ設計の時間もなかなか1年目では取れなかったですし、2年目になって設計を実際やってみると、良くないところも出てきて、軸配置の変更などを都度行っていました。その温めていたものを具体的に形にしていくことを、今回実行した感じです。
こだわりの構造なんですね。
藤井さん:この足自体が、単純に僕の自己満足でできています(笑)。本来、各関節にサーボを配置した、いわゆるシリアルリンクで事足りるんです。でも平行リンク+足ピッチ軸であれば、足の付け根と足首の水平面が必ず一致して転びにくい平行リンクの良さを含みながら、シリアルリンクのように必要な時だけ足首を蹴り上げるような、柔軟な可動範囲を実現できます。会場でもベテランの方に「こういう解決の仕方をしたのか」という驚き方をされたりしましたが、機構的なアプローチでどこまでやれるのかという挑戦を、ROBO-ONEに出るからこそ、複雑なリンクの設計として実行しているところがあります。


何があってのROBO-ONEなのか、を意識しています
これから先、藤井さんはどんなロボット作りをされていくのでしょうか
藤井さん:他の人がやった以上のことや、やっていないことをやる、というのはまず大きな目標です。ROBO-ONEの今のロボットは、規定に当てはめられた中でいかに戦うか、というのを強いられているように感じます。そうなるとロボットの形は必然的に同じようになってしまうと思うんです。規定の中でいかに「自分の機体はここがすごいんだ」というのを出せるか。ROBO-ONEは技術同士のバトルという面もあると思うので、そこで競える部分は自分で大事にしたいと思っています。ロボットってセンサとかアクチュエータとか制御系CPUとか、それら技術の総合格闘技という部分があると思うので、ソフトウェアができないと本当にロボット作ったと言えないのではないか、という気持ちもあります。僕も社会人なりたてのころはソフトウェアを中心に仕事をしていた時期もあったので、まずは下地であるハードウェアをカッチリ仕上げることで、のちのソフトウェア開発につなげていきたいと思っています。
ご自身で高いハードルを設定されているんですね
藤井さん:自分でハードルを上げないと、誰もハードル上げてくれないですから。自分で「ここを目指してます」と言うだけで、結構やる気につながっています。勝ち負けはひとつの指標なんですけど、それに固執すると袋小路に入ってしまいがちです。勝ち負けにこだわりすぎたら、何のために技術をやっているのか、ROBO-ONEをやっているのかが本末転倒になってしまうこともあると思っているので、「何があっての技術なのか、何があってのROBO-ONEなのか」というのを、ちゃんと意識して作るようにしています。